产品概述





标准参数
| 序号 | 名称 | 国际单位(代号) | +对比 |
特征
| 1.1 | 品牌 | 中力 | |
| 1.2 | 型号 | XP1-151 | |
| 1.3 | 动力型式 | 电动 | |
| 1.4 | 操作类型 | 步行式 | |
| 1.5 | 额定载荷 | Q (kg) | 1500 |
| 1.6 | 载荷中心距 | c (mm) | 600 |
重量
| 2.1 | 自重(含电瓶) | kg | 335 |
轮胎,底盘
| 3.1 | 轮胎类型,驱动轮/承载轮(转向轮) | 聚氨酯 | |
| 3.2 | 前轮尺寸(直径×宽度) | 210*94 |
尺寸
| 4.4. | 标配最大起升高度 | h3 (mm) | 110 |
| 4.9 | 操作位置手柄杆最小/最大高度 | h14 (mm) | 985/1160 |
| 4.15 | 货叉下降后高度 | h13(mm) | 85 |
| 4.19 | 整车长度 | l1 (mm) | 1635 |
| 4.20. | 到货叉垂直面的长度 | l2 (mm) | 485 |
| 4.21 | 整体宽度 | b1/ b2 (mm) | 812 |
| 4.22 | 货叉尺寸 | s/ e/ l (mm) | 55/170/1150 |
| 4.25 | 货叉外宽 | b5 (mm) | 540/600/685 |
| 4.34.1 | 托盘为 1000 × 1200交叉的通道宽度 | Ast (mm) | 2300 |
| 4.34.2 | 托盘为800 × 1200交叉的通道宽度 | Ast (mm) | 2160 |
| 4.35 | 转弯半径 | Wa (mm) | 1500 |
性能参数
| 5.1 | 行走速度,满载/空载 | km/ h | 4.5/5 |
| 5.2 | 起升速度,满载/空载 | m/ s | 0.017/0.02 |
| 5.3 | 下降速度,满载/空载 | m/ s | 0.09/0.06 |
| 5.8 | 最大爬坡度,满载/空载 | % | 6/16 |
| 5.10. | 行车制动类型 | 电磁 |
电动机,动力单元
| 6.1 | 驱动电机额定功率 S2 60分钟 | kW | 0.9 |
| 6.2 | 起升电机额定功率 S3 15% | kW | 0.84 |
| 6.4 | 电瓶电压/标称容量 | V/ Ah | 24/60 |
驱动/起升机构
| 8.1 | 驱动控制类型 | 交流 |
其他参数
| 10.5 | 转向类型 | 电子 | |
| 10.7 | 噪音等级 | dB (A) | <70 |
温馨提示:以上内容为产品介绍,所示图表可能含非标配置,若有外观、技术参数或配置的改进,我们会尽量及时更新资料,但在个别情况之下这些资料仍有可能与最新情况有所不同,请下单前联系业务经理进行确认。
XP1-151 点对点托盘搬运机器人
点对点托盘搬运机器人
产品特点:
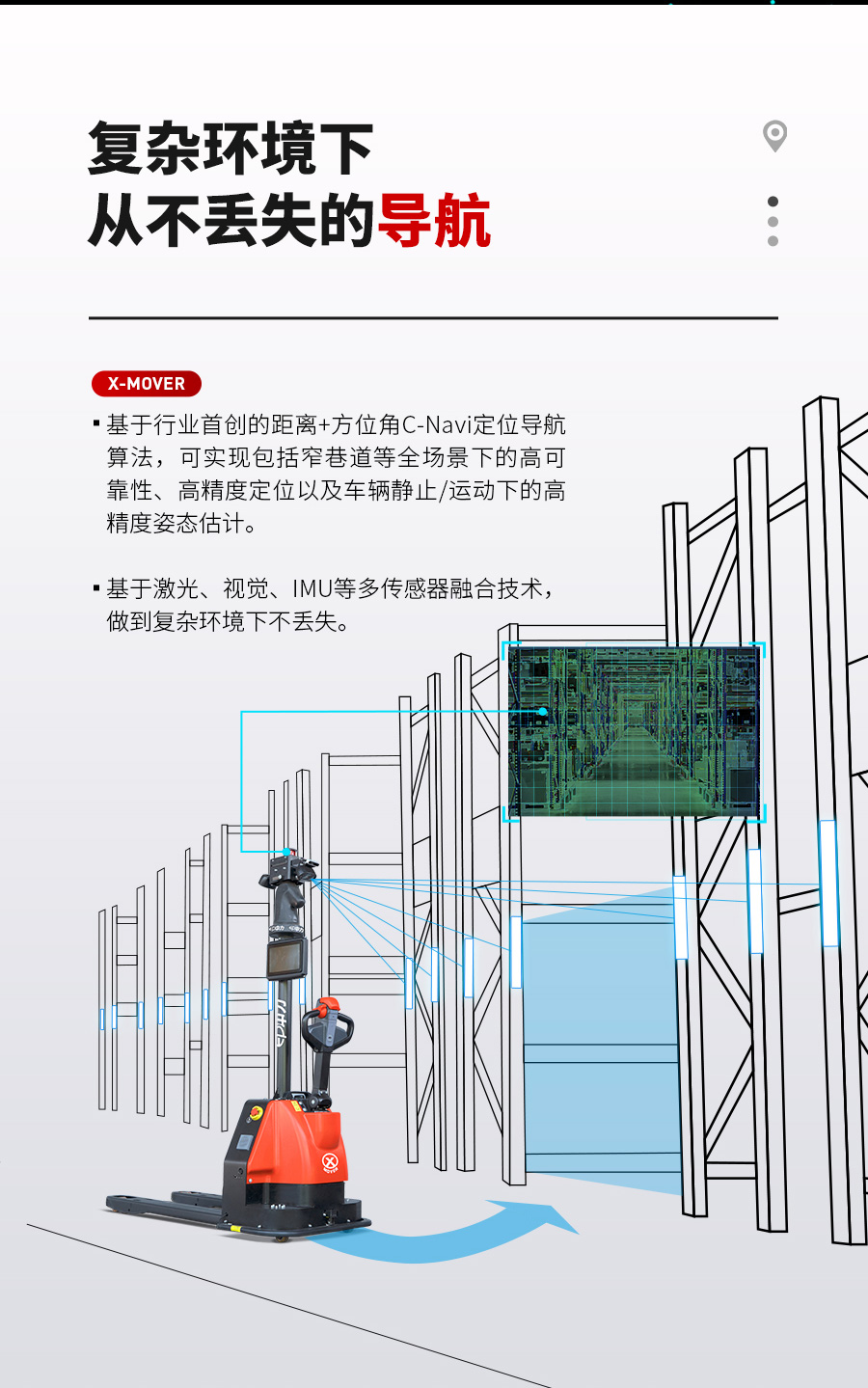
复杂场景下从不丢失的导航;
分布式多机协同技术;
多重保护下的运行安全;
极简的人机操作,随叫随到、随学随用;
分布式多机协同技术;
多重保护下的运行安全;
极简的人机操作,随叫随到、随学随用;